问题详情
深度学习中常常需要多GPU并行训练,而Nvidia的NCCL库NVIDIA/nccl(https://github.com/NVIDIA/nccl)在各大深度学习框架(Caffe/Tensorflow/Torch/Theano)的多卡并行中经常被使用,请问如何理解NCCL的原理以及特点?
回答
NCCL是Nvidia Collective multi-GPU Communication Library的简称,它是一个实现多GPU的collective communication通信(all-gather, reduce, broadcast)库,Nvidia做了很多优化,以在PCIe、Nvlink、InfiniBand上实现较高的通信速度。
下面分别从以下几个方面来介绍NCCL的特点,包括基本的communication primitive、ring-base collectives、NCCL在单机多卡上以及多机多卡实现、最后分享实际使用NCCL的一些经验。
communication primitive
并行任务的通信一般可以分为Point-to-point communication和Collective communication。P2P通信这种模式只有一个sender和一个receiver,实现起来比较简单。第二种Collective communication包含多个sender多个receiver,一般的通信原语包括broadcast,gather,all-gather,scatter,reduce,all-reduce,reduce-scatter,all-to-all等。简单介绍几个常用的操作:
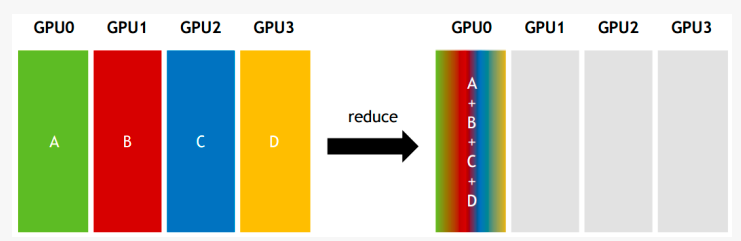
Reduce:从多个sender那里接收数据,最终combine到一个节点上。
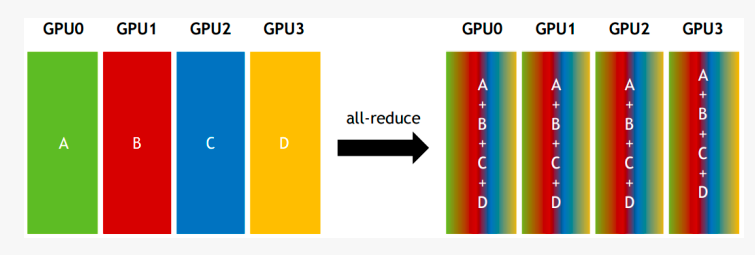
All-reduce:从多个sender那里接收数据,最终combine到每一个节点上。
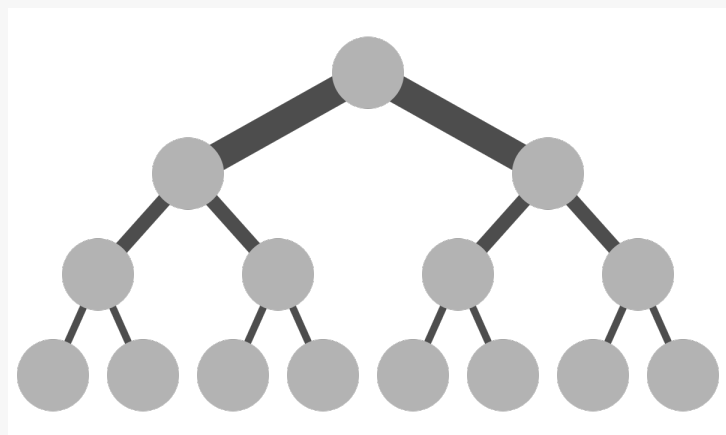
而传统Collective communication假设通信节点组成的topology是一颗fat tree,如下图所示,这样通信效率最高。但实际的通信topology可能比较复杂,并不是一个fat tree。因此一般用ring-based Collective communication。
ring-base collectives
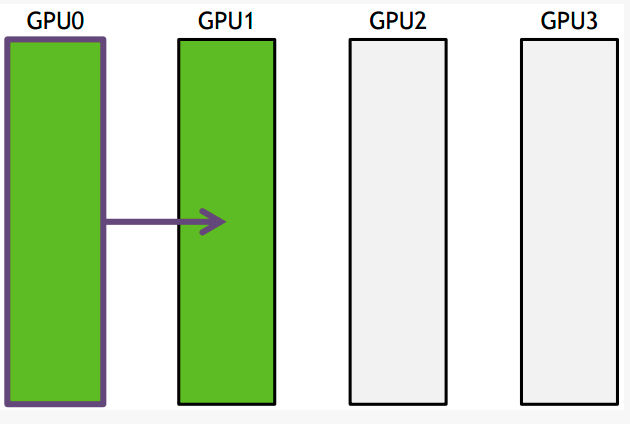
ring-base collectives将所有的通信节点通过首尾连接形成一个单向环,数据在环上依次传输。以broadcast为例, 假设有4个GPU,GPU0为sender将信息发送给剩下的GPU,按照环的方式依次传输,GPU0–>GPU1–>GPU2–>GPU3,若数据量为N,带宽为B,整个传输时间为(K-1)N/B。时间随着节点数线性增长,不是很高效。
下面把要传输的数据分成S份,每次只传N/S的数据量,传输过程如下所示:
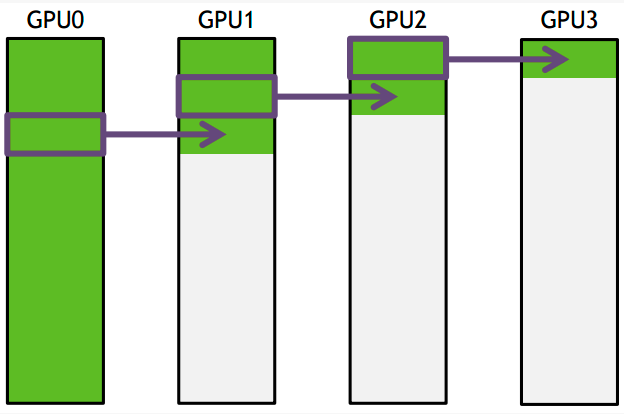
GPU1接收到GPU0的一份数据后,也接着传到环的下个节点,这样以此类推,最后花的时间为
S*(N/S/B) + (k-2)*(N/S/B) = N(S+K-2)/(SB) –> N/B,条件是S远大于K,即数据的份数大于节点数,这个很容易满足。所以通信时间不随节点数的增加而增加,只和数据总量以及带宽有关。其它通信操作比如reduce、gather以此类推。
那么在以GPU为通信节点的场景下,怎么构建通信环呢?如下图所示:
单机4卡通过同一个PCIe switch挂载在一棵CPU的场景: 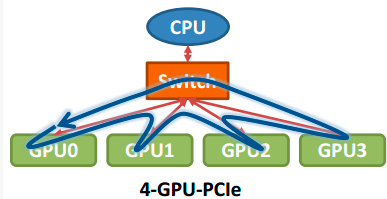
单机8卡通过两个CPU下不同的PCIe switch挂载的场景: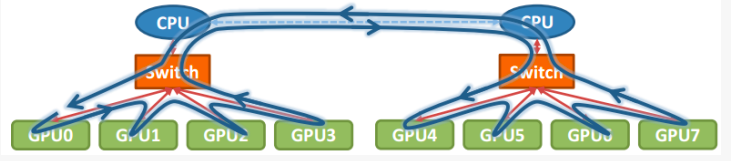
NCCL实现
NCCL实现成CUDA C++ kernels,包含3种primitive operations: Copy,Reduce,ReduceAndCopy。目前NCCL 1.0版本只支持单机多卡,卡之间通过PCIe、NVlink、GPU Direct P2P来通信。NCCL 2.0会支持多机多卡,多机间通过Sockets (Ethernet)或者InfiniBand with GPU Direct RDMA通信。
下图所示,单机内多卡通过PCIe以及CPU socket通信,多机通过InfiniBand通信。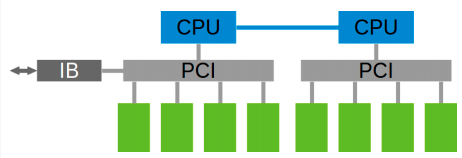
同样,在多机多卡内部,也要构成一个通信环。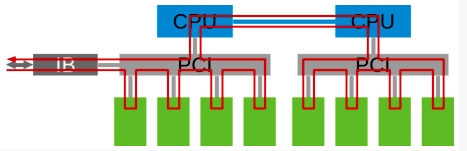
下面是单机 4卡(Maxwel GPU)上各个操作随着通信量增加的带宽速度变化,可以看到带宽上限能达到10GB/s,接近PCIe的带宽。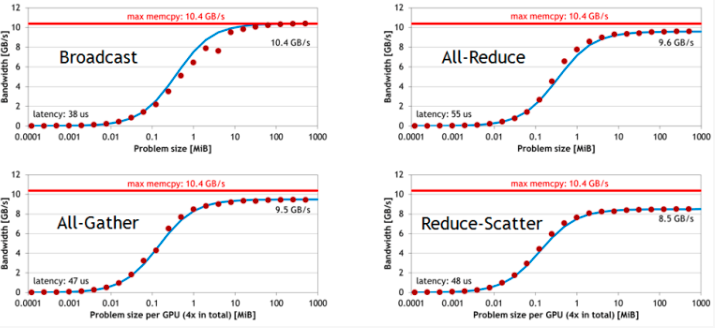
下图是Allreduce在单机不同架构下的速度比较: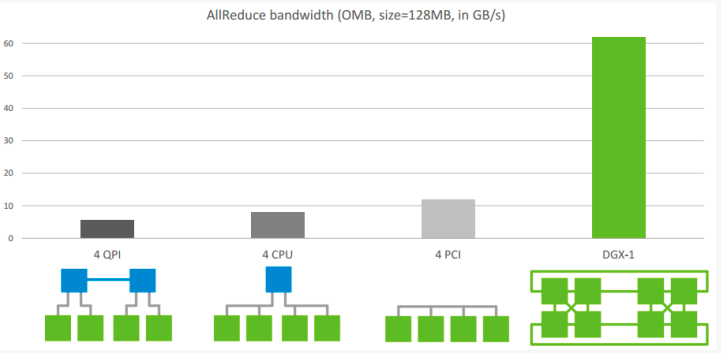
先不看DGX-1架构,这是Nvidia推出的深度学习平台,带宽能达到60GB/s。前面三个是单机多卡典型的三种连接方式,第三种是四张卡都在一个PCIe switch上,所以带宽较高,能达到>10GB/s PCIe的带宽大小,第二种是两个GPU通过switch相连后再经过CPU连接,速度会稍微低一点,第一种是两个GPU通过CPU然后通过QPI和另一个CPU上的两块卡相连,因此速度最慢,但也能达到>5GB/s。
下图是Allreduce多机下的速度表现,左图两机8卡,机内PCIe,机间InfiniBand能达到>10GB/s的速度,InfiniBand基本上能达到机内的通信速度。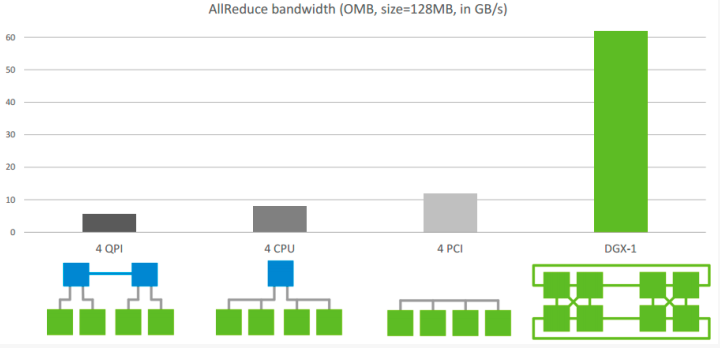
下图是NCCL在CNTK ResNet50上的scalability,32卡基本能达到线性加速比。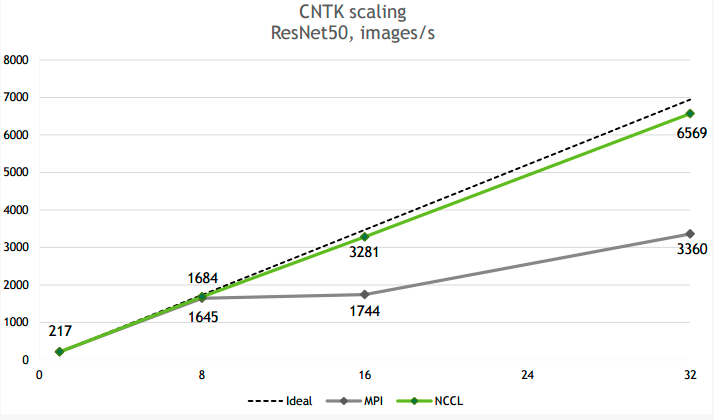
我们的实测经验
首先,在一台K40 GPU的机器上测试了GPU的连接拓扑,如下: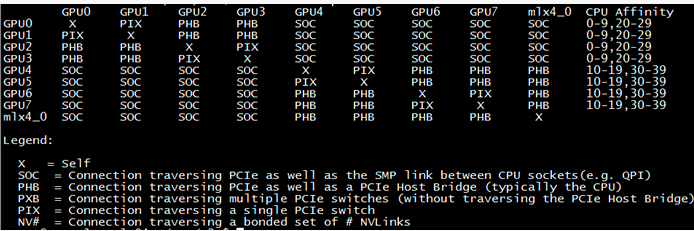
可以看到前四卡和后四卡分别通过不同的CPU组连接,GPU0和GPU1直接通过PCIe switch相连,然后经过CPU与GPU2和GPU3相连。
下面是测试PCIe的带宽,可以看到GPU0和GU1通信能达到10.59GB/s,GPU0同GPU23通信由于要经过CPU,速度稍慢,和GPU47的通信需要经过QPI,所以又慢了一点,但也能达到9.15GB/s。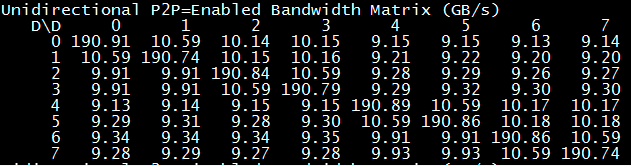
而通过NVlink连接的GPU通信速度能达到35GB/s:
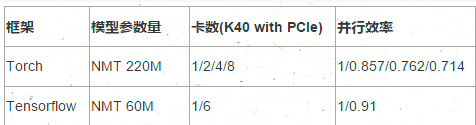
NCCL在不同的深度学习框架(CNTK/Tensorflow/Torch/Theano/Caffe)中,由于不同的模型大小,计算的batch size大小,会有不同的表现。比如上图中CNTK中Resnet50能达到32卡线性加速比,Facebook之前能一小时训练出ImageNet,而在NMT任务中,可能不会有这么大的加速比。因为影响并行计算效率的因素主要有并行任务数、每个任务的计算量以及通信时间。我们不仅要看绝对的通信量,也要看通信和计算能不能同时进行以及计算/通信比,如果通信占计算的比重越小,那么并行计算的任务会越高效。NMT模型一般较大,多大几十M上百M,不像现在image的模型能做到几M大小,通信所占比重会较高。
下面是NMT模型单机多卡加速的一个简单对比图: